
Was ist eine SPS? Ein umfassender Leitfaden für Anfänger zu speicherprogrammierbaren Steuerungen
Eine SPS (Speicherprogrammierbare Steuerung) ist ein robuster, industrietauglicher Digitalrechner zur Automatisierung elektromechanischer Prozesse in Produktionsanlagen, Maschinen und Infrastrukturen. Im Gegensatz zu herkömmlichen Computern sind SPSen so konstruiert, dass sie rauen Industriebedingungen standhalten: extremen Temperaturen, Feuchtigkeit, Staub, elektrischen Störungen und Vibrationen.
Die Aufgabe der SPS ist einfach: Sie liest Eingaben, trifft Entscheidungen auf Basis programmierter Logik und steuert Ausgaben. Man kann sie sich als das „Gehirn“ einer Maschine oder eines Prozesses vorstellen – wird ein Taster gedrückt (Eingabe), entscheidet die SPS, was geschehen soll (Logik) und aktiviert einen Motor, ein Ventil oder eine Anzeige (Ausgabe).
Vor der Einführung von SPSen basierte die industrielle Automatisierung auf Relaiskästen – großen Schränken mit Hunderten oder Tausenden von elektromechanischen Relais, Zeitschaltuhren und Schützen. Zu den Problemen zählten: die aufwändige Neuverdrahtung bei jeder Änderung (die Tage oder Wochen dauerte), mechanischer Verschleiß, der zu Ausfallzeiten führte, schwierige Fehlersuche, enormer Platzbedarf und das Fehlen einer Datenerfassungsmöglichkeit.
1968 entwickelte Bedford Associates (später Modicon) die erste speicherprogrammierbare Steuerung (SPS) – die Modicon 084 – für das Hydra-Matic-Getriebewerk von General Motors. Das Ziel war einfach: Relaisfelder durch ein programmierbares elektronisches System zu ersetzen, das sich bei Produktionsänderungen schnell rekonfigurieren ließ. Innerhalb eines Jahrzehnts hatten SPSen die Relaisfelder weltweit weitgehend verdrängt.
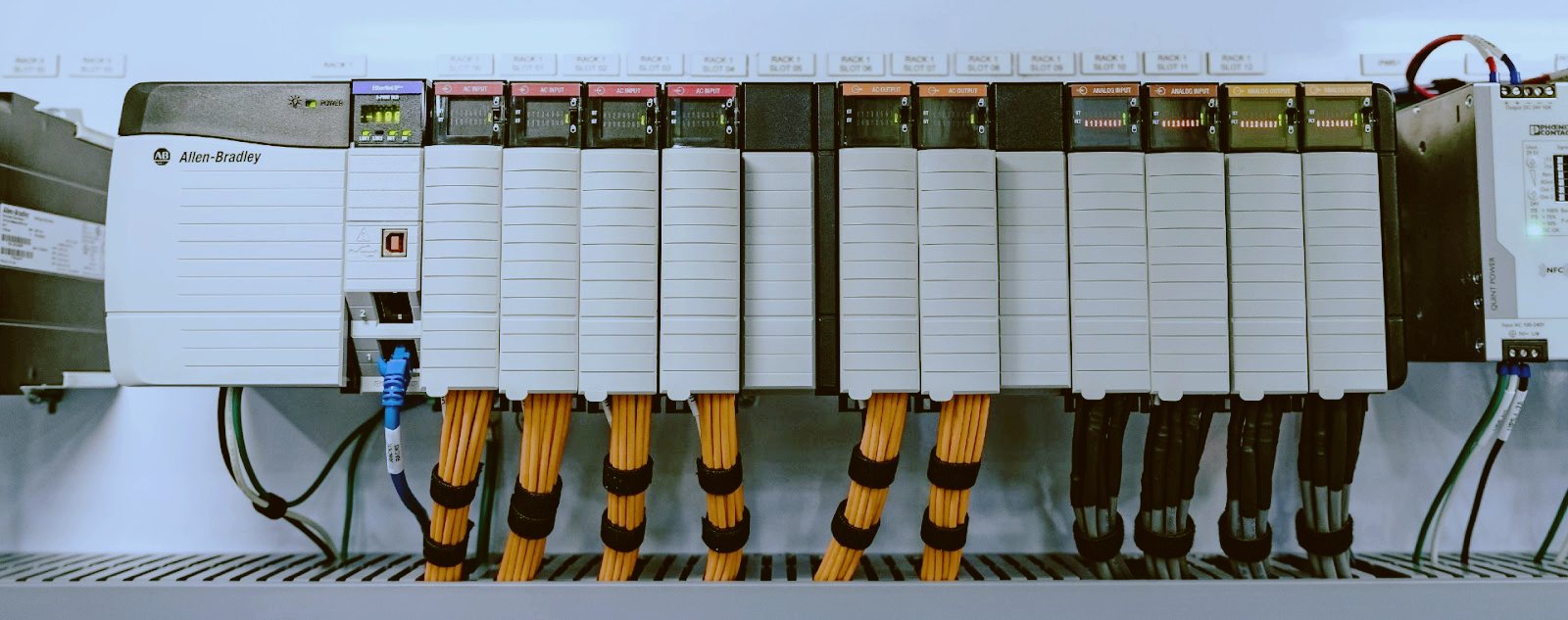
1. CPU (Zentraleinheit): Das „Gehirn“ der SPS – ein Mikroprozessor, der das Steuerungsprogramm ausführt, arithmetische und logische Operationen durchführt und die Kommunikation verwaltet. Zu den wichtigsten Spezifikationen gehören Speichergröße, Zykluszeit (ms), E/A-Kapazität und Kommunikationsschnittstellen (Ethernet, USB, RS-232/RS-485).
2. Stromversorgung: Wandelt die eingehende Netzspannung (110 V/220 V AC) in die für CPU und E/A-Module benötigten Gleichspannungen (typischerweise 24 V DC) um. Wichtige Aspekte: Nennleistung, Redundanz für kritische Anwendungen und Eingangsspannungsbereich.
3. Eingangsmodule: Sie verbinden Sensoren und Schalter mit der SPS-CPU und wandeln reale Signale in digitale Daten um. Digitale Eingänge (24 V DC) verarbeiten Drucktaster, Endschalter, Näherungssensoren und Druckschalter – sie repräsentieren lediglich EIN (1) oder AUS (0). Analoge Eingänge verarbeiten Temperatursensoren (RTD, Thermoelement), Druckmessumformer, Durchflussmesser und Füllstandssensoren mit Signalen wie 4–20 mA oder 0–10 V.
4. Ausgabemodule: Empfangen Befehle von der CPU und steuern Aktoren. Digitale Ausgänge (24 V DC, 120 V AC oder Relais) steuern Magnetventile, Schütze, Motorstarter, Kontrollleuchten und Alarme. Analoge Ausgänge treiben Frequenzumrichter, Proportionalventile und Servoantriebe mit Standardsignalen wie 4–20 mA oder 0–10 V an.
5. Rack/Backplane: Die physische Infrastruktur, die alle SPS-Module zusammenhält und den Kommunikationsbus zwischen ihnen bereitstellt.
6. Kommunikationsschnittstellen: SPSen kommunizieren mit HMIs, anderen SPSen, Antrieben und Anlagennetzwerken über Protokolle wie EtherNet/IP, PROFINET, Modbus TCP/IP, PROFIBUS, DeviceNet, ControlNet, OPC UA und serielle Verbindungen (RS-232/RS-485).
Die CPU führt ihr Programm in einer kontinuierlichen, sich wiederholenden Schleife aus, dem sogenannten Scan-Zyklus. Jeder vollständige Zyklus besteht aus vier Schritten:
Schritt 1 – Eingänge lesen: Die CPU liest alle Zustände der Eingangsmodule und speichert sie in der Eingangsbildtabelle (typischerweise 1-10 ms).
Schritt 2 – Programm ausführen: Die CPU führt das Benutzerprogramm Befehl für Befehl aus und liest und schreibt dabei aus den Eingabe-/Ausgabe-Bildtabellen im Speicher.
Schritt 3 – Ausgaben schreiben: Nach der Programmausführung aktualisiert die CPU alle Ausgabemodule gleichzeitig mit Werten aus der Ausgabebildtabelle.
Schritt 4 – Systemwartung: Die CPU führt interne Aufgaben durch, darunter HMI/SPS-Kommunikation, zeitbasierte Funktionen und Diagnosen.
Die typische Scanzeit beträgt 5-20 ms für ein mittelgroßes Programm; Hochgeschwindigkeitsanwendungen benötigen möglicherweise 0,5-1 ms.
1. Kontaktplan (KOP) – Die gängigste Sprache, insbesondere in Nordamerika. Er ist elektrischen Relaisschaltplänen nachempfunden und daher für Elektriker intuitiv verständlich. Am besten geeignet für diskrete Logik und sequentielle Steuerung.
2. Funktionsbausteindiagramm (FBD) – Verwendet grafische Blöcke mit Ein-/Ausgangsverbindungen. Jeder Block erfüllt eine spezifische Funktion – PID-Regler, Arithmetik, Logikgatter, Timer. Am besten geeignet für Prozesssteuerung und PID-Regler.
3. Strukturierter Text (ST) – Eine textbasierte Hochsprache ähnlich wie Pascal oder BASIC. Besonders leistungsfähig für komplexe Datenverarbeitung, Stapelverarbeitung und fortgeschrittene Zustandsautomaten.
4. Ablaufdiagramm (SFC) – Grafische Sprache zur Definition sequenzieller Prozesse – Operationen, die schrittweise mit Aktionen und kontrollierten Übergängen ablaufen. Am besten geeignet für Chargenprozesse und Verpackungsmaschinen.
5. Befehlsliste (IL) – Eine textbasierte Low-Level-Sprache, ähnlich der Assemblersprache. Kompakt und effizient, aber weniger lesbar. Am besten geeignet für einfache, kompakte Abläufe und ältere Systeme.
SPS: Konzipiert für die diskrete Fertigung (Einzelmaschinen, Montagelinien). Schnelle Abtastzeiten, robuste Hardware. Skalierbar für Hunderte bis Tausende von E/A-Punkten.
DCS (Verteiltes Steuerungssystem): Konzipiert für kontinuierliche Prozessindustrien (Öl & Gas, Chemie, Energieerzeugung). Hochredundant und eng mit den Prozessvariablen integriert. Skalierbar für Tausende bis Hunderttausende von Ein-/Ausgangspunkten.
Industrie-PC (IPC): Entwickelt für Hochgeschwindigkeits-Datenverarbeitung, Bildverarbeitungssysteme und komplexe Algorithmen. PC-basiert, läuft unter Windows oder Linux und bietet hohe Rechenleistung.
Die Grenzen zwischen SPS, DCS und IPC sind in den letzten Jahren deutlich verschwommen.
Schritt 1: Definieren Sie die Anwendung – Einzelmaschine oder anlagenweites System, Anforderungen an die Hochgeschwindigkeits-Bewegungssteuerung, sicherheitskritische Anforderungen, aktuelle und zukünftige E/A-Anzahlen.
Schritt 2: Bewertung des Markenökosystems – Allen Bradley dominiert in Amerika, Siemens in Europa/Asien, Mitsubishi in Japan und auf kostensensiblen Märkten, ABB im Bereich der Prozessautomatisierung.
Schritt 3: Berücksichtigen Sie die Softwarekosten – die Hardware macht oft nur 30-50 % der Gesamtbetriebskosten aus; die Softwarelizenzierung kann ebenso teuer sein (Allen Bradley Studio 5000: 5.000-15.000+ US-Dollar).
Schritt 4: I/O-Anforderungen abgleichen – Berechnen Sie die benötigten digitalen Eingänge, digitalen Ausgänge und analogen Signale und geben Sie eine Reserve von 20 % für zukünftige Erweiterungen hinzu.
Schritt 5: Kommunikationsanforderungen überprüfen – HMI-Konnektivität, Anlagennetzwerkintegration (MES/ERP), Antriebs-/SPS-Kommunikation und Fernzugriffsfähigkeit.
Flaggschiffprodukte:ControlLogix, CompactLogix, MicroLogix, SLC 500
Programmiersoftware:Studio 5000 Logix Designer
Kommunikation:EtherNet/IP, ControlNet, DeviceNet, Modbus
Webseite:www.rockwellautomation.com
Flaggschiffprodukte:SIMATIC S7-1500, S7-1200, S7-300, S7-400
Programmiersoftware:TIA-Portal
Kommunikation:PROFINET, PROFIBUS, Modbus TCP/IP, OPC UA
Webseite:www.siemens.com
Flaggschiffprodukte:MELSEC iQ-R, iQ-F, MELSEC-Q, MELSEC-F
Programmiersoftware:GX Works3
Kommunikation:CC-Link IE, Modbus TCP/IP, EtherNet/IP
Webseite:www.mitsubishielectric.com
Flaggschiffprodukte:AC500, AC500-eco, AC700
Programmiersoftware:Automatisierungs-Builder
Kommunikation:EtherNet/IP, PROFINET, Modbus TCP/IP, CANopen
Webseite:new.abb.com/plc
Flaggschiffprodukte:ControlLogix (über Honeywell), Experion PKS
Programmiersoftware:Experiment Studio
Kommunikation:EtherNet/IP, Modbus, OPC UA
Webseite:www.honeywellprocess.com
Flaggschiffprodukte:NX1P2, NJ501, CP1H, CP1L
Programmiersoftware:Sysmac Studio, CX-Programmierer
Kommunikation:EtherNet/IP, Modbus TCP/IP, USB
Webseite: www.omron-ap.com
Diese Anleitung dient ausschließlich Schulungszwecken. Für spezifische Anwendungshinweise wenden Sie sich bitte an einen qualifizierten Automatisierungsingenieur oder an das technische Vertriebsteam von TZ TECH.

Bitte lesen Sie weiter, bleiben Sie auf dem Laufenden, abonnieren Sie uns und wir heißen Sie herzlich willkommen, uns Ihre Meinung mitzuteilen.



Darüber hinaus möchten wir mit Ihrer Erlaubnis Cookies platzieren, um Ihren Besuch und die Interaktion mit slOC persönlicher zu gestalten. Hierzu verwenden wir Analyse- und Werbecookies. Mit diesen Cookies können wir und Dritte Ihr Internetverhalten innerhalb und außerhalb von super-instrument.com verfolgen und erfassen. Dabei passen wir und Dritte super-instrument.com und Werbung an Ihre Interessen an. Indem Sie auf „Akzeptieren“ klicken, stimmen Sie dem zu. Wenn Sie dies ablehnen, verwenden wir nur die notwendigen Cookies und Sie erhalten leider keine personalisierten Inhalte. Bitte besuchen Sie unsere Cookie-Richtlinie für weitere Informationen oder um Ihre Einwilligung in Zukunft zu ändern.
Accept and continue Decline cookies












